C语言适配器模式
Table of contents
- 痛,太痛了,业务代码绑定了硬件抽象
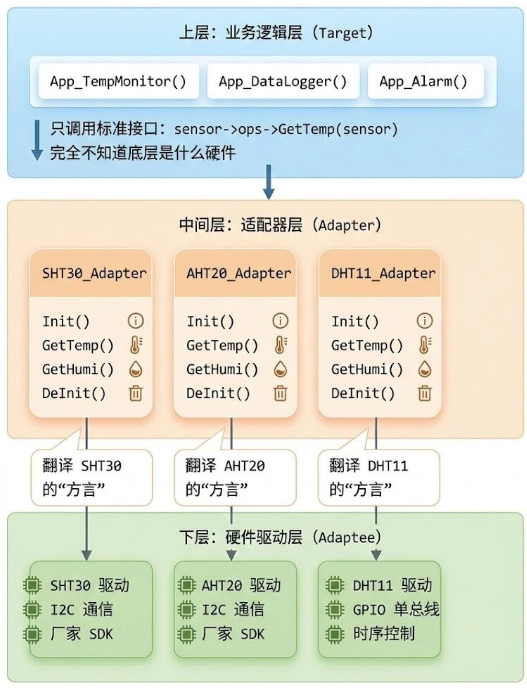
- 适配器模式原理:三层汉堡包模型
- 实战步骤一:定义”目标接口”(The Target)
- 实战步骤二:实现”适配器”(The Adapter)
- 实战步骤三:注册与注入(Dependency Injection)
- 进阶场景:既有 I2C 又有 UART 怎么办?
- 避坑指南
- 总结
核心卖点:解决”硬件依赖”,实现”一套业务代码,随意切换底层硬件”。
痛,太痛了,业务代码绑定了硬件抽象
// app_task.c - 业务逻辑层
void App_TempMonitor_Task(void)
{
uint8_t data[6];
float temperature, humidity;
// 直接调用 ST 的 HAL 库,死死绑定 SHT30
HAL_I2C_Master_Transmit(&hi2c1, SHT30_ADDR << 1, cmd_measure, 2, 100);
HAL_Delay(20);
HAL_I2C_Master_Receive(&hi2c1, SHT30_ADDR << 1, data, 6, 100);
// SHT30 特定的数据解析
uint16_t raw_temp = (data[0] << 8) | data[1];
temperature = -45.0f + 175.0f * (float)raw_temp / 65535.0f;
uint16_t raw_humi = (data[3] << 8) | data[4];
humidity = 100.0f * (float)raw_humi / 65535.0f;
// 业务逻辑:温度报警
if (temperature > 30.0f) {
Alarm_Trigger();
}
// 业务逻辑:上传云端
Cloud_Upload(temperature, humidity);
// 业务逻辑:本地显示
LCD_Display(temperature, humidity);
}
这段代码有什么问题?
- 问题一:硬件细节暴露在业务层
- SHT30_ADDR、HAL_I2C_Master_Transmit、特定的数据解析公式——这些统统是硬件细节,却直接写在了业务逻辑里。
- 问题二:改一处需要改 N 处
- 假设你的项目里有 10 个地方读取温湿度(监控任务、报警任务、显示任务、存储任务……),那你就得改 10 处代码。而且每改一处,都有引入 Bug 的风险。
- 问题三:无法做单元测试
- 想测试报警逻辑是否正确?对不起,你得接上真实的传感器。想模拟一个 35 度的高温场景?只能拿热风枪吹。
适配器模式原理:三层汉堡包模型
实战步骤一:定义”目标接口”(The Target)
接口设计原则:承接好业务层
业务层需要什么? 注意,是”业务层需要什么”,而不是”硬件能提供什么”。以温湿度传感器为例,业务层需要的是: 1. 初始化传感器 2. 读取温度值 3. 读取湿度值 4. 关闭/休眠传感器
至于这个温度值是通过 I2C 读的还是 SPI 读的,是浮点数还是整型再换算的——业务层不关心,也不应该关心。
接口定义示例
// ========================================
// 文件:sensor_interface.h
// 功能:定义传感器的统一接口
// ========================================
#ifndef __SENSOR_INTERFACE_H__
#define __SENSOR_INTERFACE_H__
#include <stdint.h>
// 前向声明
typedef struct TempSensor TempSensor_t;
// ========================================
// 操作函数指针表(这是适配器模式的核心!)
// ========================================
typedef struct {
/**
* @brief 初始化传感器
* @param self: 传感器对象指针
* @return 0=成功, 负数=失败
*/
int (*Init)(TempSensor_t *self);
/**
* @brief 读取温度
* @param self: 传感器对象指针
* @return 温度值(摄氏度),失败返回 -999.0f
*/
float (*GetTemp)(TempSensor_t *self);
/**
* @brief 读取湿度
* @param self: 传感器对象指针
* @return 湿度值(%RH),失败返回 -999.0f
*/
float (*GetHumi)(TempSensor_t *self);
/**
* @brief 反初始化/休眠传感器
* @param self: 传感器对象指针
*/
void (*DeInit)(TempSensor_t *self);
} Sensor_Ops_t;
// ========================================
// 传感器对象结构体
// ========================================
struct TempSensor {
const char *name; // 传感器名称(调试用)
Sensor_Ops_t *ops; // 操作函数指针表
void *priv; // 私有数据指针(关键!)
};
#endif /* __SENSOR_INTERFACE_H__ */
一:函数指针表 Sensor_Ops_t (基于传感器入参的业务动作)
typedef struct {
int (*Init)(TempSensor_t *self);
float (*GetTemp)(TempSensor_t *self);
float (*GetHumi)(TempSensor_t *self);
void (*DeInit)(TempSensor_t *self);
} Sensor_Ops_t;
这种设计在 C 语言里非常常见,Linux 内核里到处都是这种写法。比如文件系统的 file_operations、设备驱动的 device_ops 等等
二:传感器对象 TempSensor_t(传感器标识名+函数指针表+私有数据)
struct TempSensor {
const char *name; // 传感器名称
Sensor_Ops_t *ops; // 函数指针表
void *priv; // 私有数据(核心!)
};
这个结构体代表一个”传感器实例”。业务层拿到这个指针后,就可以通过 sensor->ops->GetTemp(sensor) 来读取温度。
三:void *priv 的妙用(抽象地址存放私有数据)
这是整个设计的灵魂。不同传感器需要的私有数据完全不同: 如果我们把这些数据类型都写死在接口里,那接口就不通用了。
解决方案:用 void * 指针。void * 是 C 语言的”万能指针”,可以指向任何类型的数据。在适配器内部,我们再把它强制转换回具体的类型。

// SHT30 适配器内部
static float SHT30_GetTemp(TempSensor_t *self) {
// 把 void* 转换回 SHT30 的私有数据类型
SHT30_PrivData_t *priv = (SHT30_PrivData_t *)self->priv;
// 现在可以使用 priv->hi2c、priv->addr 等
HAL_I2C_Master_Transmit(priv->hi2c, priv->addr << 1, ...);
...
}
接口设计的常见误区
误区一:接口太具体–暴露硬件相关的入参
// 错误示例:接口暴露了 I2C 细节
typedef struct {
int (*Init)(I2C_HandleTypeDef *hi2c, uint8_t addr); // ← 不好!
float (*GetTemp)(I2C_HandleTypeDef *hi2c); // ← 不好!
} Sensor_Ops_t;
这样写的问题是:如果换成 GPIO 单总线的 DHT11,接口就不适用了。
误区二:接口太抽象–全用void*参数啥信息也不提供
// 错误示例:接口过于通用,失去了意义
typedef struct {
int (*Read)(void *param1, void *param2, void *param3); // ← 啥意思?
} Sensor_Ops_t;
这样写的问题是:接口没有任何语义,调用者不知道该传什么参数。
正确做法:以业务需求为导向
接口应该描述”业务层需要什么”,而不是”硬件能做什么”:
- GetTemp() —— 获取温度
- GetHumi() —— 获取湿度
- Init() —— 初始化
- DeInit() —— 反初始化
至于底层怎么实现,那是适配器的事。
实战步骤二:实现”适配器”(The Adapter)
SHT30 适配器完整实现
头文件:adapter_sht30.h
// ========================================
// 文件:adapter_sht30.h
// 功能:SHT30 传感器适配器
// ========================================
#ifndef __ADAPTER_SHT30_H__
#define __ADAPTER_SHT30_H__
#include "sensor_interface.h"
#include "stm32f1xx_hal.h" // 根据你的 MCU 修改
/**
* @brief 创建一个 SHT30 传感器实例
* @param hi2c: I2C 句柄指针
* @param addr: I2C 地址(7 位,通常是 0x44 或 0x45)
* @return 传感器对象指针,失败返回 NULL
*/
TempSensor_t *Adapter_SHT30_Create(I2C_HandleTypeDef *hi2c, uint8_t addr);
/**
* @brief 销毁 SHT30 传感器实例
* @param sensor: 传感器对象指针
*/
void Adapter_SHT30_Destroy(TempSensor_t *sensor);
#endif /* __ADAPTER_SHT30_H__ */
源文件:adapter_sht30.c
// ========================================
// 文件:adapter_sht30.c
// 功能:SHT30 传感器适配器实现
// ========================================
#include "adapter_sht30.h"
#include <stdlib.h>
#include <string.h>
// ========================================
// 私有数据结构(每种传感器都不一样)
// ========================================
typedef struct {
I2C_HandleTypeDef *hi2c; // I2C 句柄
uint8_t addr; // I2C 地址
float last_temp; // 缓存上次读取的温度
float last_humi; // 缓存上次读取的湿度
} SHT30_PrivData_t;
// ========================================
// 私有函数声明
// ========================================
static int SHT30_Init(TempSensor_t *self);
static float SHT30_GetTemp(TempSensor_t *self);
static float SHT30_GetHumi(TempSensor_t *self);
static void SHT30_DeInit(TempSensor_t *self);
static int SHT30_ReadRaw(SHT30_PrivData_t *priv);
// ========================================
// 操作函数表(静态全局,所有 SHT30 实例共享)
// ========================================
static Sensor_Ops_t sht30_ops = {
.Init = SHT30_Init,
.GetTemp = SHT30_GetTemp,
.GetHumi = SHT30_GetHumi,
.DeInit = SHT30_DeInit,
};
// ========================================
// 公开函数:创建适配器实例
// ========================================
TempSensor_t *Adapter_SHT30_Create(I2C_HandleTypeDef *hi2c, uint8_t addr)
{
// 1. 分配传感器对象内存
TempSensor_t *sensor = (TempSensor_t *)malloc(sizeof(TempSensor_t));
if (sensor == NULL) {
return NULL;
}
// 2. 分配私有数据内存
SHT30_PrivData_t *priv = (SHT30_PrivData_t *)malloc(sizeof(SHT30_PrivData_t));
if (priv == NULL) {
free(sensor);
return NULL;
}
// 3. 初始化私有数据
priv->hi2c = hi2c;
priv->addr = addr;
priv->last_temp = -999.0f;
priv->last_humi = -999.0f;
// 4. 组装传感器对象
sensor->name = "SHT30";
sensor->ops = &sht30_ops; // 指向函数指针表
sensor->priv = priv; // 指向私有数据
return sensor;
}
// ========================================
// 公开函数:销毁适配器实例
// ========================================
void Adapter_SHT30_Destroy(TempSensor_t *sensor)
{
if (sensor != NULL) {
if (sensor->priv != NULL) {
free(sensor->priv);
}
free(sensor);
}
}
// ========================================
// 私有函数:初始化
// ========================================
static int SHT30_Init(TempSensor_t *self)
{
SHT30_PrivData_t *priv = (SHT30_PrivData_t *)self->priv;
// SHT30 软复位命令
uint8_t cmd[] = {0x30, 0xA2};
HAL_StatusTypeDef status = HAL_I2C_Master_Transmit(
priv->hi2c,
priv->addr << 1,
cmd,
sizeof(cmd),
100
);
if (status != HAL_OK) {
return -1;
}
HAL_Delay(10); // 等待复位完成
return 0;
}
// ========================================
// 私有函数:读取原始数据(内部使用)
// ========================================
static int SHT30_ReadRaw(SHT30_PrivData_t *priv)
{
uint8_t cmd[] = {0x2C, 0x06}; // 高精度测量命令
uint8_t data[6];
// 发送测量命令
if (HAL_I2C_Master_Transmit(priv->hi2c, priv->addr << 1, cmd, 2, 100) != HAL_OK) {
return -1;
}
HAL_Delay(20); // 等待测量完成
// 读取数据
if (HAL_I2C_Master_Receive(priv->hi2c, priv->addr << 1, data, 6, 100) != HAL_OK) {
return -1;
}
// 解析温度(SHT30 特定的公式)
uint16_t raw_temp = (data[0] << 8) | data[1];
priv->last_temp = -45.0f + 175.0f * (float)raw_temp / 65535.0f;
// 解析湿度
uint16_t raw_humi = (data[3] << 8) | data[4];
priv->last_humi = 100.0f * (float)raw_humi / 65535.0f;
return 0;
}
// ========================================
// 私有函数:获取温度
// ========================================
static float SHT30_GetTemp(TempSensor_t *self)
{
SHT30_PrivData_t *priv = (SHT30_PrivData_t *)self->priv;
if (SHT30_ReadRaw(priv) != 0) {
return -999.0f; // 读取失败
}
return priv->last_temp;
}
// ========================================
// 私有函数:获取湿度
// ========================================
static float SHT30_GetHumi(TempSensor_t *self)
{
SHT30_PrivData_t *priv = (SHT30_PrivData_t *)self->priv;
// 复用上次读取的数据(因为 SHT30 是同时读温湿度的)
return priv->last_humi;
}
// ========================================
// 私有函数:反初始化
// ========================================
static void SHT30_DeInit(TempSensor_t *self)
{
// SHT30 没有特殊的休眠命令,这里留空
(void)self;
}
技巧一:私有数据结构
每种传感器定义自己的私有数据结构:
typedef struct {
I2C_HandleTypeDef *hi2c; // I2C 句柄
uint8_t addr; // I2C 地址
float last_temp; // 缓存温度
float last_humi; // 缓存湿度
} SHT30_PrivData_t;
这个结构体只在 .c 文件内部使用,外部看不到。这就是封装。
技巧二:Static函数指针表
static Sensor_Ops_t sht30_ops = {
.Init = SHT30_Init,
.GetTemp = SHT30_GetTemp,
.GetHumi = SHT30_GetHumi,
.DeInit = SHT30_DeInit,
};
函数指针表声明为 static,所有 SHT30 实例共享同一张表。这样节省内存。
技巧三:工厂函数
TempSensor_t *Adapter_SHT30_Create(I2C_HandleTypeDef *hi2c, uint8_t addr);
用”工厂函数”来创建对象,而不是让调用者手动初始化结构体。这样可以:
- 隐藏内部实现细节
- 统一管理内存分配
- 方便后续扩展
技巧四:void * 到具体类型的转换
static float SHT30_GetTemp(TempSensor_t *self)
{
// 关键:把 void* 转换回具体类型
SHT30_PrivData_t *priv = (SHT30_PrivData_t *)self->priv;
// 现在可以正常使用 priv 了
...
}
这种转换是类型安全的,因为我们在 Create 函数里已经确保 priv 指向的是正确的类型。
再写一个 AHT20 适配器
有了 SHT30 的模板,写 AHT20 适配器就很快了。主要是换一下私有数据和底层操作:
// ========================================
// AHT20 私有数据(和 SHT30 不一样)
// ========================================
typedef struct {
I2C_HandleTypeDef *hi2c;
uint8_t addr; // AHT20 固定是 0x38
uint8_t calibrated; // 校准标志
float last_temp;
float last_humi;
} AHT20_PrivData_t;
// ========================================
// AHT20 初始化(和 SHT30 完全不同)
// ========================================
static int AHT20_Init(TempSensor_t *self)
{
AHT20_PrivData_t *priv = (AHT20_PrivData_t *)self->priv;
// AHT20 上电需要等待 40ms
HAL_Delay(40);
// 读取状态寄存器,检查校准位
uint8_t status;
HAL_I2C_Master_Receive(priv->hi2c, priv->addr << 1, &status, 1, 100);
// 如果未校准,发送校准命令
if ((status & 0x08) == 0) {
uint8_t cmd[] = {0xBE, 0x08, 0x00};
HAL_I2C_Master_Transmit(priv->hi2c, priv->addr << 1, cmd, 3, 100);
HAL_Delay(10);
}
priv->calibrated = 1;
return 0;
}
// ========================================
// AHT20 数据读取(和 SHT30 的公式不同)
// ========================================
static int AHT20_ReadRaw(AHT20_PrivData_t *priv)
{
// AHT20 触发测量命令
uint8_t cmd[] = {0xAC, 0x33, 0x00};
HAL_I2C_Master_Transmit(priv->hi2c, priv->addr << 1, cmd, 3, 100);
HAL_Delay(80); // AHT20 测量需要 80ms
// 读取 7 字节数据
uint8_t data[7];
HAL_I2C_Master_Receive(priv->hi2c, priv->addr << 1, data, 7, 100);
// 检查忙标志
if (data[0] & 0x80) {
return -1; // 设备忙
}
// AHT20 的数据解析公式(和 SHT30 完全不同!)
uint32_t raw_humi = ((uint32_t)data[1] << 12) |
((uint32_t)data[2] << 4) |
((uint32_t)data[3] >> 4);
priv->last_humi = (float)raw_humi * 100.0f / 1048576.0f;
uint32_t raw_temp = ((uint32_t)(data[3] & 0x0F) << 16) |
((uint32_t)data[4] << 8) |
(uint32_t)data[5];
priv->last_temp = (float)raw_temp * 200.0f / 1048576.0f - 50.0f;
return 0;
}
你看,虽然 SHT30 和 AHT20 的底层实现完全不同,但它们对外暴露的接口是一样的。 业务层调用方式完全相同:
// 无论是 SHT30 还是 AHT20,业务层代码都是这样写
float temp = sensor->ops->GetTemp(sensor);
float humi = sensor->ops->GetHumi(sensor);
这就是适配器模式的魅力!
实战步骤三:注册与注入(Dependency Injection)
有了接口和适配器,最后一步是把它们”连起来”。这一步通常在 main() 函数里完成。
最简单的使用方式
// ========================================
// 文件:main.c
// ========================================
#include "sensor_interface.h"
#include "adapter_sht30.h"
#include "adapter_aht20.h"
// I2C 句柄(由 CubeMX 生成)
extern I2C_HandleTypeDef hi2c1;
// 全局传感器对象指针
TempSensor_t *g_sensor = NULL;
int main(void)
{
// HAL 初始化...
HAL_Init();
SystemClock_Config();
MX_I2C1_Init();
// ========================================
// 关键:在这里选择使用哪个传感器!
// ========================================
// 方案 A:使用 SHT30
g_sensor = Adapter_SHT30_Create(&hi2c1, 0x44);
// 方案 B:使用 AHT20(只需改这一行!)
// g_sensor = Adapter_AHT20_Create(&hi2c1, 0x38);
if (g_sensor == NULL) {
Error_Handler(); // 创建失败
}
// 初始化传感器
if (g_sensor->ops->Init(g_sensor) != 0) {
Error_Handler(); // 初始化失败
}
// 进入主循环
while (1) {
App_Run(g_sensor);
HAL_Delay(1000);
}
}
// ========================================
// 业务逻辑(完全不知道底层是什么传感器)
// ========================================
void App_Run(TempSensor_t *sensor)
{
float temp = sensor->ops->GetTemp(sensor);
float humi = sensor->ops->GetHumi(sensor);
printf("[%s] Temp: %.1f C, Humi: %.1f %%\r\n",
sensor->name, temp, humi);
// 业务逻辑:温度报警
if (temp > 30.0f) {
LED_On(LED_ALARM);
} else {
LED_Off(LED_ALARM);
}
}
看到没?换传感器只需要改一行代码:
g_sensor = Adapter_SHT30_Create(&hi2c1, 0x44);
// 换成 AHT20:
g_sensor = Adapter_AHT20_Create(&hi2c1, 0x38);
App_Run() 里面的几百行业务代码,一个字都不用改!
进阶:运行时自动检测
如果你的产品需要同时支持多种传感器(比如出厂时根据 BOM 不同,可能焊接不同的传感器),可以实现运行时自动检测:
// ========================================
// 自动检测并创建传感器对象
// ========================================
TempSensor_t *Sensor_AutoDetect(I2C_HandleTypeDef *hi2c)
{
TempSensor_t *sensor = NULL;
// 1. 尝试检测 SHT30(地址 0x44)
if (I2C_IsDeviceReady(hi2c, 0x44) == HAL_OK) {
sensor = Adapter_SHT30_Create(hi2c, 0x44);
printf("Detected: SHT30\r\n");
}
// 2. 尝试检测 AHT20(地址 0x38)
else if (I2C_IsDeviceReady(hi2c, 0x38) == HAL_OK) {
sensor = Adapter_AHT20_Create(hi2c, 0x38);
printf("Detected: AHT20\r\n");
}
// 3. 都没检测到
else {
printf("No sensor detected!\r\n");
sensor = NULL;
}
return sensor;
}
// main.c 中使用
int main(void)
{
// 初始化...
// 自动检测传感器
g_sensor = Sensor_AutoDetect(&hi2c1);
if (g_sensor == NULL) {
Error_Handler();
}
// 后续代码完全一样...
}
这样做的好处是:
- 生产灵活性:同一套代码可以兼容多种 BOM 配置
- 维护简单:新增传感器支持只需要加一个适配器 + 加一行检测代码
- 调试方便:通过 sensor->name 就能知道当前用的是哪个传感器
依赖注入的本质
上面这种写法,在软件工程里叫做“依赖注入”(Dependency Injection)。传统的写法(硬编码):
// App 内部直接创建依赖
void App_Run(void) {
SHT30_Read(); // 写死了,改不了
}
依赖注入的写法:
// 依赖从外部"注入"进来
void App_Run(TempSensor_t *sensor) {
sensor->ops->GetTemp(sensor); // 不管是什么,用就行
}
// main() 里决定注入什么
g_sensor = Adapter_SHT30_Create(...); // 这里决定
App_Run(g_sensor);
依赖注入的好处:
- 解耦:App_Run 不依赖任何具体传感器
- 可测试:可以注入一个”假”的传感器来做单元测试
- 可扩展:新增传感器不用改业务代码
单元测试:注入模拟传感器
有了依赖注入,单元测试变得非常简单。我们可以创建一个”假”的传感器,用来模拟各种场景:
// ========================================
// 模拟传感器(用于单元测试)
// ========================================
typedef struct {
float mock_temp; // 模拟的温度值
float mock_humi; // 模拟的湿度值
} MockSensor_PrivData_t;
static float Mock_GetTemp(TempSensor_t *self) {
MockSensor_PrivData_t *priv = (MockSensor_PrivData_t *)self->priv;
return priv->mock_temp; // 直接返回模拟值
}
static float Mock_GetHumi(TempSensor_t *self) {
MockSensor_PrivData_t *priv = (MockSensor_PrivData_t *)self->priv;
return priv->mock_humi;
}
// 创建模拟传感器
TempSensor_t *MockSensor_Create(float temp, float humi) {
// ... 分配内存,设置 mock_temp 和 mock_humi
}
// ========================================
// 单元测试示例
// ========================================
void Test_AlarmTrigger(void)
{
// 1. 创建模拟传感器,设置温度为 35 度
TempSensor_t *mock = MockSensor_Create(35.0f, 60.0f);
// 2. 运行业务逻辑
App_Run(mock);
// 3. 检查报警是否触发
assert(LED_IsOn(LED_ALARM) == true);
// 4. 销毁模拟传感器
MockSensor_Destroy(mock);
}
void Test_NoAlarm(void)
{
// 1. 创建模拟传感器,设置温度为 25 度
TempSensor_t *mock = MockSensor_Create(25.0f, 60.0f);
// 2. 运行业务逻辑
App_Run(mock);
// 3. 检查报警是否未触发
assert(LED_IsOn(LED_ALARM) == false);
// 4. 销毁模拟传感器
MockSensor_Destroy(mock);
}
你看,有了模拟传感器:
- 不需要真实硬件就能测试业务逻辑
- 可以模拟极端情况(-40 度、100 度等)
- 测试可重复,不受环境温度影响
进阶场景:既有 I2C 又有 UART 怎么办?
你可能会问:如果我的项目里,有些传感器是 I2C 的,有些是通过 UART 传输数据的(比如激光测距模块),适配器模式还能用吗? 答案是:当然可以!这正是适配器模式的威力所在。
场景描述
假设你有一个环境监测系统,需要采集以下数据: 
这些传感器通信方式不同,数据类型也不同。如何统一管理?
设计思路:多种接口类型
我们可以定义多种”接口类型”,每种接口对应一类传感器:
// ========================================
// 温湿度传感器接口(之前已经定义)
// ========================================
typedef struct {
int (*Init)(void *self);
float (*GetTemp)(void *self);
float (*GetHumi)(void *self);
void (*DeInit)(void *self);
} TempSensor_Ops_t;
// ========================================
// 光照传感器接口
// ========================================
typedef struct {
int (*Init)(void *self);
float (*GetLux)(void *self); // 获取光照强度(勒克斯)
void (*DeInit)(void *self);
} LightSensor_Ops_t;
// ========================================
// PM2.5 传感器接口
// ========================================
typedef struct {
int (*Init)(void *self);
int (*GetPM25)(void *self); // 获取 PM2.5 浓度(ug/m³)
int (*GetPM10)(void *self); // 获取 PM10 浓度
void (*DeInit)(void *self);
} PMSensor_Ops_t;
// ========================================
// GPS 接口
// ========================================
typedef struct {
int (*Init)(void *self);
int (*GetPosition)(void *self, double *lat, double *lon);
void (*DeInit)(void *self);
} GPS_Ops_t;
UART 传感器的适配器示例
以 PM2.5 传感器(通过 UART 通信)为例:
// ========================================
// PM2.5 传感器适配器(UART 通信)
// ========================================
typedef struct {
UART_HandleTypeDef *huart; // UART 句柄
uint8_t rx_buffer[32]; // 接收缓冲区
int pm25_value;
int pm10_value;
} PMS_PrivData_t;
static int PMS_Init(void *self)
{
PMSensor_t *sensor = (PMSensor_t *)self;
PMS_PrivData_t *priv = (PMS_PrivData_t *)sensor->priv;
// 开启 UART 接收中断
HAL_UART_Receive_IT(priv->huart, priv->rx_buffer, 32);
return 0;
}
static int PMS_GetPM25(void *self)
{
PMSensor_t *sensor = (PMSensor_t *)self;
PMS_PrivData_t *priv = (PMS_PrivData_t *)sensor->priv;
// 解析 UART 接收到的数据帧(PMS 传感器专用协议)
if (priv->rx_buffer[0] == 0x42 && priv->rx_buffer[1] == 0x4D) {
// 校验通过,提取 PM2.5 数据
priv->pm25_value = (priv->rx_buffer[6] << 8) | priv->rx_buffer[7];
}
return priv->pm25_value;
}
// 创建函数
PMSensor_t *Adapter_PMS5003_Create(UART_HandleTypeDef *huart)
{
// ... 分配内存,初始化私有数据
}
业务层的统一使用
// ========================================
// 业务层:环境数据采集
// ========================================
void App_CollectEnvironmentData(
TempSensor_t *temp_sensor,
LightSensor_t *light_sensor,
PMSensor_t *pm_sensor,
GPS_t *gps
)
{
// 读取各种数据(业务层完全不知道底层通信方式)
float temp = temp_sensor->ops->GetTemp(temp_sensor);
float humi = temp_sensor->ops->GetHumi(temp_sensor);
float lux = light_sensor->ops->GetLux(light_sensor);
int pm25 = pm_sensor->ops->GetPM25(pm_sensor);
double lat, lon;
gps->ops->GetPosition(gps, &lat, &lon);
// 打包上传
Upload_Data(temp, humi, lux, pm25, lat, lon);
}
// main.c
int main(void)
{
// 创建各种传感器(不同的通信方式,统一的使用方式)
TempSensor_t *temp = Adapter_SHT30_Create(&hi2c1, 0x44); // I2C
LightSensor_t *light = Adapter_BH1750_Create(&hi2c1, 0x23); // I2C
PMSensor_t *pm = Adapter_PMS5003_Create(&huart2); // UART
GPS_t *gps = Adapter_ATGM336H_Create(&huart3); // UART
// 业务层统一调用
App_CollectEnvironmentData(temp, light, pm, gps);
}
关键点:
- 业务层 App_CollectEnvironmentData 完全不知道 I2C 和 UART 的存在
- 想把 SHT30(I2C)换成 DHT11(GPIO)?只改 main.c 里的一行
- 想把 UART GPS 换成 SPI GPS?只改 main.c 里的一行
这就是适配器模式的威力:业务层只关心”做什么”,不关心”怎么做”。
避坑指南
在实际使用适配器模式时,有几个坑需要注意:
性能陷阱
问题: 函数指针调用比直接函数调用多几条汇编指令。
// 直接调用(编译器可能内联优化)
float temp = SHT30_GetTemp();
// 函数指针调用(无法内联,多一次间接寻址)
float temp = sensor->ops->GetTemp(sensor);
影响:对于绝大多数应用,这点开销可以忽略不计(纳秒级别)。但是,如果你在做以下场景,要慎用适配器模式:
- 高频 GPIO 翻转(1MHz 以上的 PWM 模拟、软件 SPI 等)
- 实时性要求极高的中断服务程序
- 循环次数极大的算法(图像处理、FFT 等)
建议:
// 对于高频操作,用宏或内联函数
#define GPIO_TOGGLE_FAST(port, pin) ((port)->BSRR = (pin))
// 对于低频操作(传感器读取、通信等),放心用适配器模式
float temp = sensor->ops->GetTemp(sensor);
内存陷阱
问题:每个适配器实例都要分配内存。
TempSensor_t *sensor = Adapter_SHT30_Create(&hi2c1, 0x44);
// 这里面 malloc 了两次:一次 TempSensor_t,一次 SHT30_PrivData_t
影响:
- 在内存充裕的 MCU(STM32F4、ESP32 等)上,问题不大
- 在内存紧张的 MCU(STM32F0、51 单片机等)上,要小心
解决方案:静态分配
// 不用 malloc,用静态变量
static TempSensor_t g_sensor_obj;
static SHT30_PrivData_t g_sht30_priv;
TempSensor_t *Adapter_SHT30_CreateStatic(I2C_HandleTypeDef *hi2c, uint8_t addr)
{
g_sht30_priv.hi2c = hi2c;
g_sht30_priv.addr = addr;
g_sensor_obj.name = "SHT30";
g_sensor_obj.ops = &sht30_ops;
g_sensor_obj.priv = &g_sht30_priv;
return &g_sensor_obj;
}
代价:静态分配后,只能创建一个实例。如果需要多个 SHT30(比如板子上焊了两颗),还是得用动态分配或者数组。
过度设计陷阱
问题:适配器模式不是万能药,不要为了设计模式而设计模式。
什么时候不需要适配器?
- 项目一次性:只做一次,交付后再也不改,直接怼就行
- 硬件不可能变:已经量产 10 万台了,芯片不可能换了
- 代码量很小:整个项目就 500 行代码,抽象层比业务层还多
- 时间紧迫:老板说明天就要演示,你还在那设计架构?
什么时候需要适配器?
- 长期维护的产品:要持续迭代好几年
- 平台化项目:同一套代码要跑在多种硬件上
- 团队协作:多人开发,需要清晰的模块边界
- 需要单元测试:想在没有硬件的情况下测试业务逻辑
调试陷阱
问题:函数指针调用增加了调试难度。当你在调试器里单步调试时,看到:
float temp = sensor->ops->GetTemp(sensor);
你不能直接看出 GetTemp 指向的是哪个函数。得在运行时查看 sensor->ops->GetTemp 的值。
解决方案:
- 加日志:在每个适配器函数入口打印日志
- 用 name 字段:sensor->name 可以告诉你当前用的是哪个适配器
- IDE 支持:现代 IDE(如 CLion、VS Code)可以在调试时显示函数指针指向的函数名
总结
恭喜你读到这里!让我们回顾一下本文的核心内容: 适配器模式解决了什么问题? 核心痛点:硬件变更导致代码大面积修改 解决方案:在业务层和硬件层之间插入一个”适配器层” 核心价值:
- 业务代码与硬件解耦
- 换硬件只需改一行代码
- 支持运行时动态切换
- 便于单元测试
三层架构速记

关键代码速记
接口定义
typedef struct {
int (*Init)(TempSensor_t *self);
float (*GetTemp)(TempSensor_t *self);
float (*GetHumi)(TempSensor_t *self);
void (*DeInit)(TempSensor_t *self);
} Sensor_Ops_t;
struct TempSensor {
const char *name;
Sensor_Ops_t *ops;
void *priv; // 万能私有数据指针
};
使用方式
// 创建
TempSensor_t *sensor = Adapter_SHT30_Create(&hi2c1, 0x44);
// 使用(业务层)
float temp = sensor->ops->GetTemp(sensor);
// 换硬件?改这一行就行
TempSensor_t *sensor = Adapter_AHT20_Create(&hi2c1, 0x38);
适配器模式是嵌入式软件”抗通胀(抗需求变更)”的最佳武器。它多写了一层代码,却节省了未来无数倍的维护时间。